publications
2026
-
 On the Generalization Capabilities, Design Choices and Limitations of Keypoint Imitation Learningunder review, 2026
On the Generalization Capabilities, Design Choices and Limitations of Keypoint Imitation Learningunder review, 2026 -
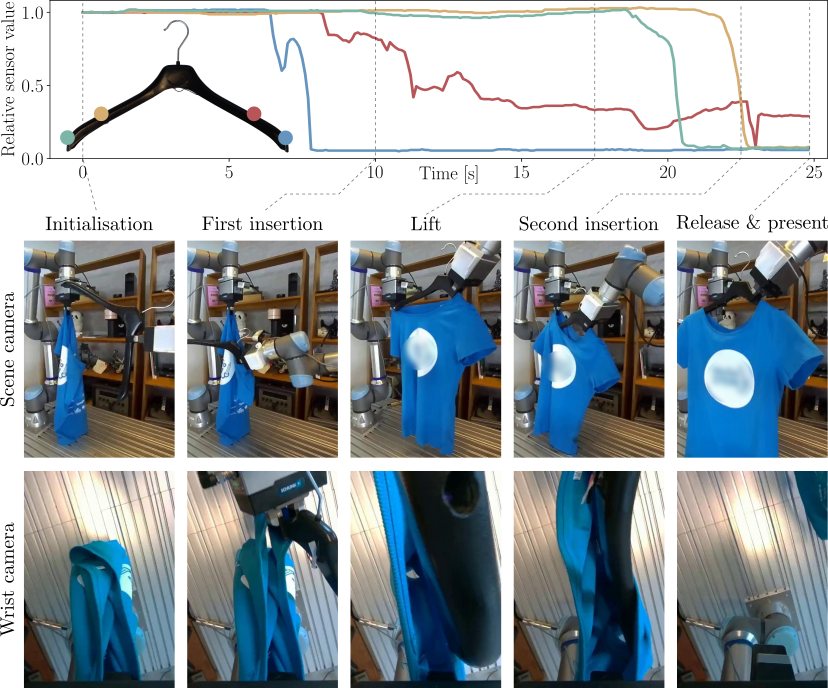 Instrumentation for Imitation Learning: Enhancing Training Datasets for Clothes Hanger InsertionIn IEEE International Conference on Robotics and Automation (ICRA) , 2026
Instrumentation for Imitation Learning: Enhancing Training Datasets for Clothes Hanger InsertionIn IEEE International Conference on Robotics and Automation (ICRA) , 2026



2025
-
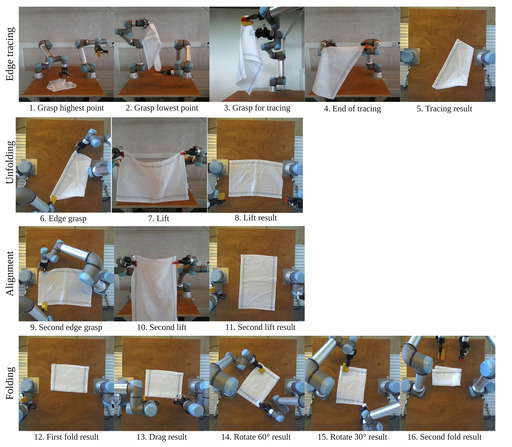 Insights for robotic cloth manipulation: A comprehensive analysis of a competition-winning systemInternational Journal of Advanced Robotic Systems, 2025
Insights for robotic cloth manipulation: A comprehensive analysis of a competition-winning systemInternational Journal of Advanced Robotic Systems, 2025 -
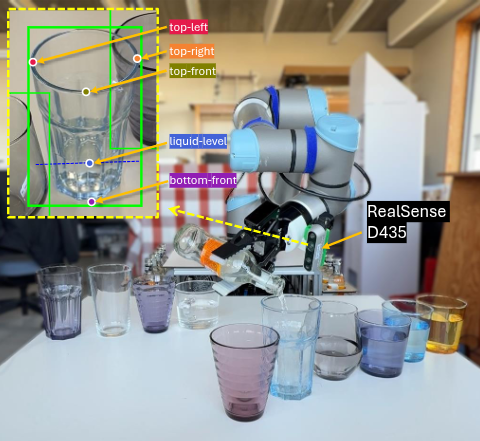 SPILL: Size, Pose, and Internal Liquid Level Estimation of Transparent Glassware for Robotic BartendingIEEE Robotics and Automation Letters, 2025
SPILL: Size, Pose, and Internal Liquid Level Estimation of Transparent Glassware for Robotic BartendingIEEE Robotics and Automation Letters, 2025





